
ブログタイトルに「活動記録」とついてるので、これからは作業が進み次第マイクロマウスの進捗報告をしていきたいと思っています。
こうした方がモチベ維持につながるんじゃね??とも思っているので。
今日やったこと概要
- しきい値の調整ほぼ完了
- どうやらイキってWMMC標準プログラムを書き換えた時に重大なミスをした模様
- とりあえず今週土曜の全日本学生大会は定速走行 with 比例制御で出場することに決定
- ブザーをデフォルトでオンに
- ゴール後の謎挙動を修正
しきい値の調整
完了しました。多分これでOKです。センサチェックモードで確かめてみましたが、まあ妥当な値でしょう。壁切れ判定等もいい感じにできています。
前々から、何故かたまに左に吸い込まれてしまう現象がありましたが、イキってサークル標準のプログラムを自分なりに改造してたらその際にミスが有ったらしく、気づくまでなんと半年かかりました。なんじゃそりゃ。
ちなみに問題の箇所はこちらです。ソースコード晒すことになるけどごく一部だから良いよね。
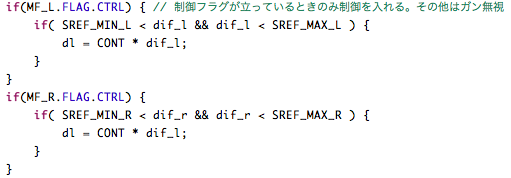
お分かりいただけただろうか
このブロックは比例制御の部分なのですが、よく見ると右センサの制御範囲を見ている画像下部で何故か左用の変数に左センサの制御値を格納してしまっています。え〜、つまり、右側の制御なんか一切無視でやっていたんですね。逆にこれまでそれなりに動いてたのがすげぇよ。
また、アルゴリズムはちょっともう修正している暇はないのでこれまで通り定速走行 with 比例制御で出ます。次の大会までにはなんとかしたい...
ブザーを使う
無言でスタートするのってなんか嫌じゃないですか?「今から走るぜウェーイ」とか「ゴールしたよ!」的な合図欲しいですよね。ということで、これまで適当にやっていたものを本格的に実装しました。
具体的には、これまであくまでオプション的な立ち位置だったのですが、メインに昇格。更にゴール時の某竜王的な RPG ゲームのレベルアップ音、そしてスタート前のカウントダウンを入れました。非常にそれっぽくて可愛いです。
ゴール時の謎挙動
ゴールしたのに無限に直進し続ける現象があるんですよ。それも修正したつもりです。しかしここでLi-Poバッテリーが切れてしまったため今のところ動作確認は出来ていません。。
東京工芸大学で行われる全日本学生大会では「ARMic-SMA」という機体名で参加します。随分ノロいやつですが、よろしくお願いします。